My master thesis was a great way to introduce myself into the field of telepresence and virtual headset control.
Archiv pro rubriku: robotics
Python + Gamepad = CLI grabber + drawille = CLI stick direction visualiser
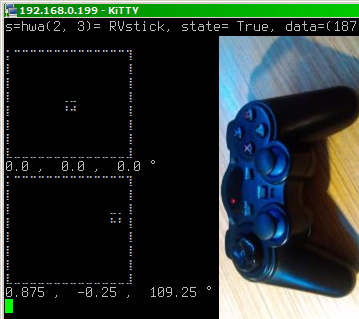 So I am creating a robot gr4dalek with a Mecanum drive. I thought omni-drive — I can drive in all directions. When on manual I need to give angle direction and speed. So gamepad. Also, keep it simple, I didn’t want to use pygame, tell me more about bloat processing.
So I am creating a robot gr4dalek with a Mecanum drive. I thought omni-drive — I can drive in all directions. When on manual I need to give angle direction and speed. So gamepad. Also, keep it simple, I didn’t want to use pygame, tell me more about bloat processing.