
Do předmětu Rozpoznávání, který korigujeme na škole, jsme napsali běžný work-flow s gitem – pro úplné začátečníky. Takže pokud chcete vědět jestli mát první komitovat a pak až pullovat nebo naopak tak se můžete začíst 🙂
Archiv pro měsíc: Březen 2017
AHK gr4comboAll – shortcut window
Part of my AHK script is also a gr4comboAll which is a hotkey to generate this gui. I can choose any file or anything to appear here.

Odpad v Brně zpracovávaný společností SAKO

Pořád si myslíte, že třídění nemá smysl? Že vytříděné kontejnery stejně smíchají a spálí takže je to jedno? Teď už vám můžu říct, hlupáci, že by se to nikomu nevyplatilo! Aneb soupis polopravd omylů a mýtů o odpadu uvedených na pravou míru.
Python + Gamepad = CLI grabber + drawille = CLI stick direction visualiser
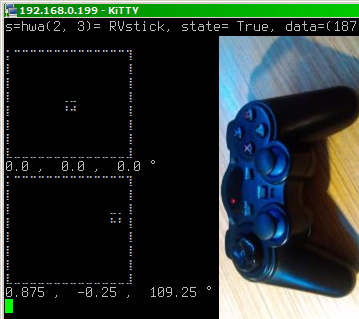 So I am creating a robot gr4dalek with a Mecanum drive. I thought omni-drive — I can drive in all directions. When on manual I need to give angle direction and speed. So gamepad. Also, keep it simple, I didn’t want to use pygame, tell me more about bloat processing.
So I am creating a robot gr4dalek with a Mecanum drive. I thought omni-drive — I can drive in all directions. When on manual I need to give angle direction and speed. So gamepad. Also, keep it simple, I didn’t want to use pygame, tell me more about bloat processing.